
请输入网站标题




 浏览器自带分享功能也很好用哦~
浏览器自带分享功能也很好用哦~
1. 检查两个销栓是否损坏以及是否牢固。
2. 用起重机或叉车将机器人运至安装地点。
运输吊具不得损坏库卡机器人。
3. 清洁机器人的支承面。
4. 将机器人垂直地放到地基上。为了避免销钉损坏,应注意位置要正好垂直。
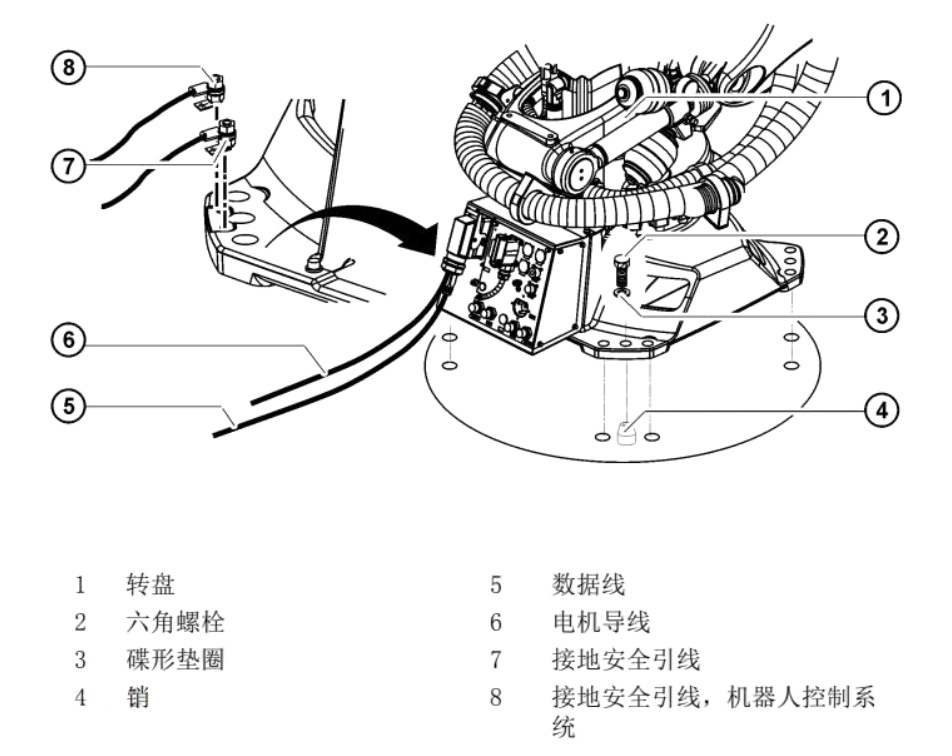
5. 装上8个六角螺栓 M24x65-8.8及碟形垫圈。
6. 用扭矩扳手拧紧六角螺栓。分几次将拧紧扭矩增加至 640 Nm。
7. 拆下运输吊具、环首螺栓或叉车插口。
8. 连接电机电缆 X30 和数据线 X31。
9. 将接地线 (机器人控制系统—机器人)连接在接地安全引线上。
10. 将接地线 (系统部件—机器人)连接在接地安全引线上。
11. 按照 VDE 0100 和 EN 60204-1 检查电位均衡导线
12. 将压缩空气气源连接至压力调节器,将压力调节器清零; F 型。
13. 打开压缩空气气源,并将压力调节器设置为 0.01 MPa (0.1 bar) ; F型。
14. 需要时装上工具。
15. 100 个运行小时后,用扭矩扳手将 8 根六角螺栓再次拧紧
News
Contact us

联系我们
Copyright © 2022 佛山BSport体育官网机器人科技有限公司
品牌认证
832天
已认证
品牌认证
832天
已认证
粤ICP备2022093261号-2

选择区号